空を飛ぶ二足歩行ロボット「Jet-HR2」が開発中
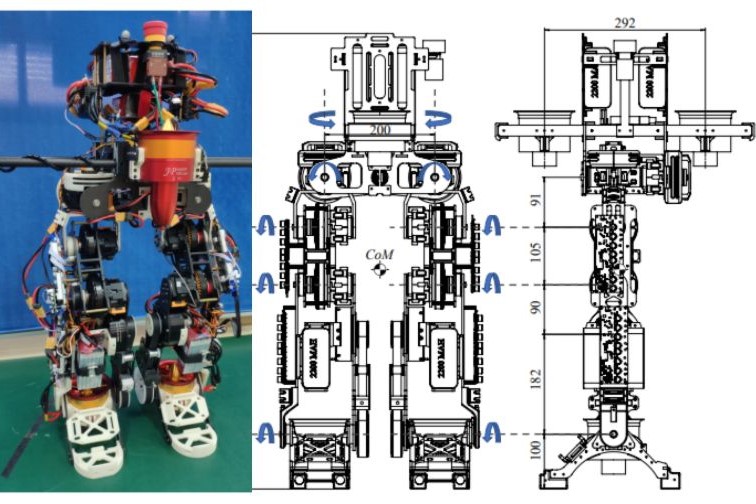
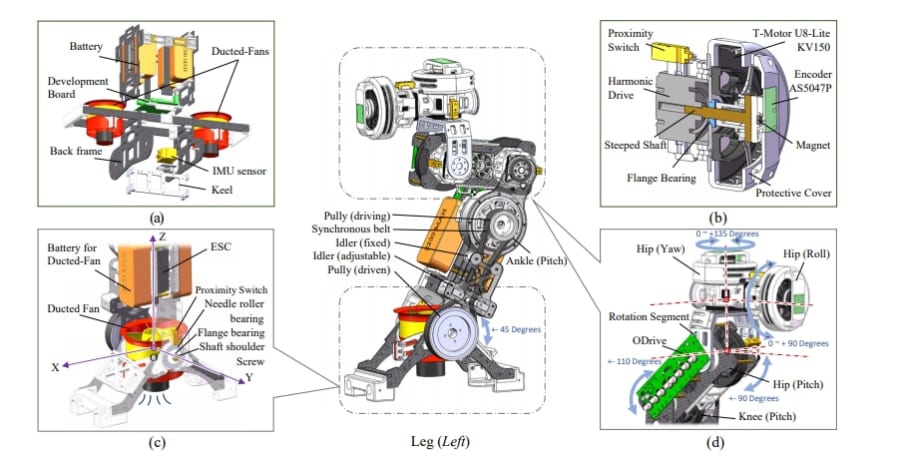
開発中のJet-HR2には、Jet-HR1と同様、2本の足にそれぞれ1つずつファンが装着されています。
さらに追加で2つのファンをロボットの腰に装着。
それぞれのファンの推力は5kg(合計20kg)なので、17kgのロボットを持ち上げるには十分な推力を生み出します。
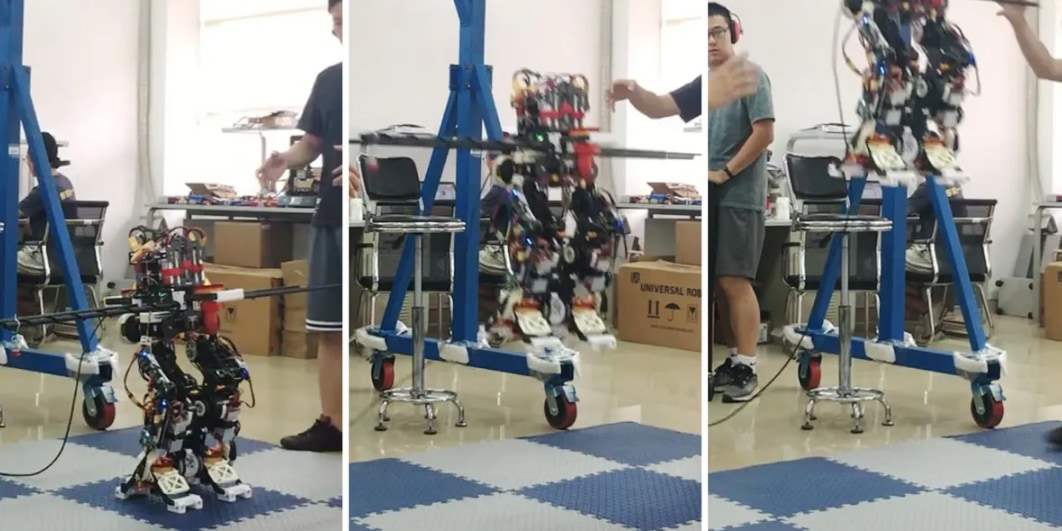
課題は空中でバランスを保つことですが、Jet-HR2は両足を動かして姿勢を制御するようです。
動画では離陸時の姿勢制御の様子が映し出されています。
何度かの試行の後、ある程度の安定性が得られたようです。
チームは空を飛ぶ二足歩行ロボットを作った理由を、「災害救助・捜索用」としています。
二足歩行ロボットは複雑な地形を登ったり乗り越えたりするのに向いていますが、ロボットの体長を超える段差やより複雑な地形では無力です。
そのため飛行能力を持たせるなら、より難しい環境での移動と作業が可能になるというのです。
とはいえ、空飛ぶ二足歩行ロボットを災害現場用に実用化させるのは非常に難しく、現段階では効率的な計画だとは言えません。
ドローンや4足歩行ロボットの方がまだ現実的です。
今のところ、「足のファンで空を飛ぶ人型ロボットを作りたかったから、作った」という感じですね。
もちろん将来的には、この研究が別のアイデアの基礎となるかもしれないので、Jet-HRシリーズの今後も見守っていきたいものです。


























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)
![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)