


「生物と機械の融合」がロボットの可能性を広げるかも
生物の皮膚や組織、筋肉は、柔軟かつ軽量で、環境に優しく、高いエネルギー効率を誇ります。
また、触覚や光、熱などの環境の様々な信号に反応することもできます。
しかし、科学者たちが、生物レベルに高性能なロボットや部品を生み出すのは、まだまだ先のことです。
そうであれば、そのような部品が開発されるのをずっと待つよりも、既に存在している生物の一部をロボットと組み合わせる方が良いかもしれません。
近年、そのようなバイオハイブリッドロボットの研究が進められています。
例えば、培養したネズミの筋肉細胞を利用して動作するロボットや、ヒトの心筋細胞で泳ぐ魚ロボットが開発されてきました。
もちろん現段階では、これらの技術は実用的ではありません。
生体組織は、「寿命の制限」「環境要因の影響を受けやすいこと」また「培養の難しさ」ゆえ、実際にロボットに組み込んで持続させるには、膨大な労力がかかるからです。
それでも将来、このようなバイオハイブリッドロボットは、従来のロボット技術の限界を超える可能性を秘めています。

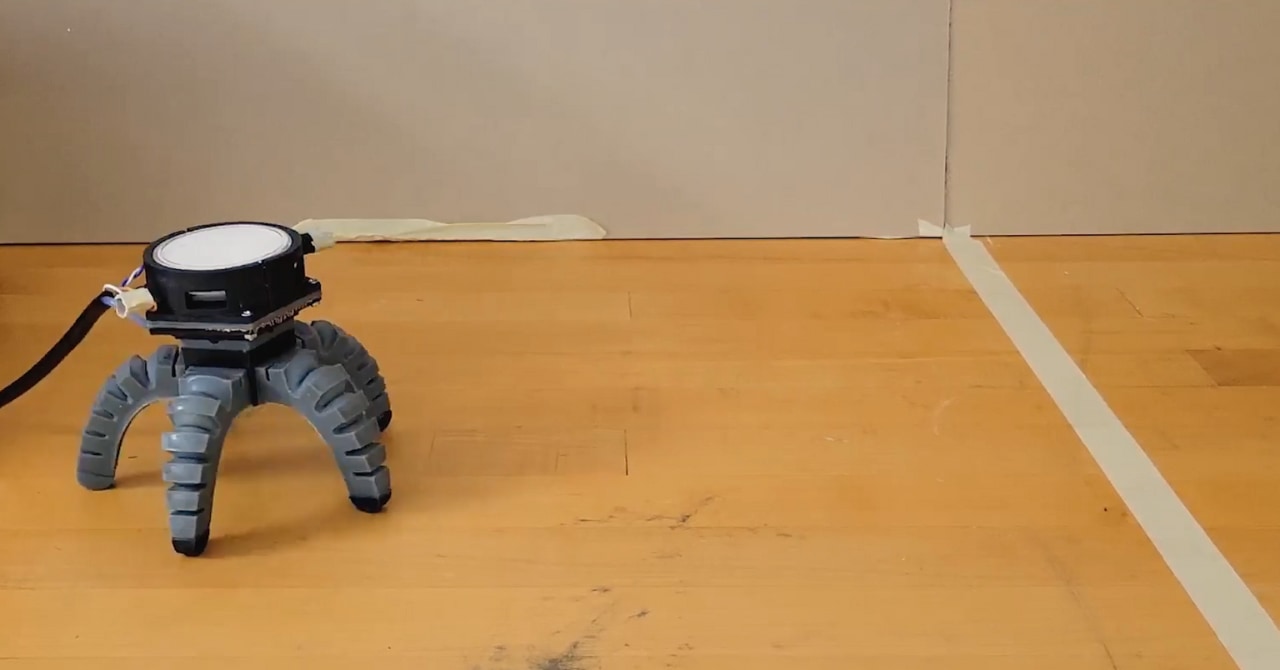
今回、シェパード氏らは、より使いやすく、堅牢な生体部品として、カビやキノコなどの真菌類が持つ糸状の構造「菌糸」に着目しました。
そもそもキノコは菌糸が集まってできたものであり、地下では根のように広がる菌糸によって栄養を吸収しています。
また菌糸は、厳しい環境でも生育でき、化学的および生物学的信号を感知し、それらに反応する能力も備えています。
まさに堅牢な生体部品としてはピッタリな存在なのです。
そこでシェパード氏らは、菌糸を利用したバイオハイブリッドロボットを開発することにしました。



















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)



![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)




![Smalife スクリーンアンプ 16インチ [2026アップグレード版] スマホ拡大鏡スタンド 5倍大画面満喫 スクリーン拡大器 目の保護 疲労軽減 スマホ画面拡大 スタンド折り畳み式 軽量 携帯便利 全部スマートフォンに適用(ブラックC)](https://m.media-amazon.com/images/I/41Ql2fO48jL._SL500_.jpg)