クモヒトデは触られた腕の2つ隣に逃げる
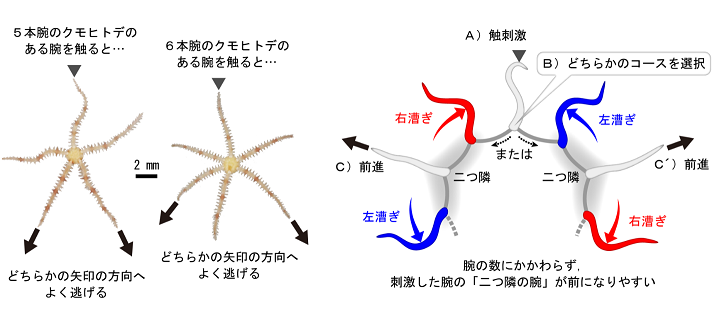
実験結果により、クモヒトデには「触られた腕の2つ隣の腕の方向へ逃げる」傾向があると分かりました。
つまり、4腕個体は刺激した腕とは反対方向に、5腕個体は反対側から左右どちらかに少しずれた方向に、7腕個体になると刺激に対して直角方向に逃げるのです。
クモヒトデの各腕には放射神経が走っており、すべてが身体の中央にあるリング状の神経を介して繋がっています。
ある腕が刺激を受けると、その信号が中央神経に伝わります。中央神経はリング状なので、信号は左回りもしくは右回りで伝わっていきます。それぞれの腕にも順番に信号が送られるようになっています。
1番目に信号が伝わる腕(刺激があった隣の腕)には、平泳ぎのような動きをさせます。2番目に伝わる腕は「前方」となり、左右に偏らない中立的な動きをさせます。そして3番目に伝わる腕には1番目の腕と対になるような動きをさせるのです。
クモヒトデは腕の数にかかわらず、刺激によって即座に前方が定まるメカニズムをもっています。そして、定まった前方に進むように両隣の腕が動くのです。
研究者たちはこの柔軟なメカニズムを全方位移動ロボットの制御に活用できると考えています。災害現場や宇宙環境において、瞬時の判断で巧みに方向転換できるロボットを生み出せるかもしれないのです。
reference: 北海道大学 / written by ナゾロジー編集部






















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)