
4つ足は”日本の折り紙”から誕生
マイクロボットの胴体部には、光の照射で起電する電気回路が搭載されており、レーザーを当てることで起動します。
まだ必要最低限の機能しかありませんが、半導体チップと互換性のある製造方法となっているので、高い計算処理能力を持たせることが可能です。
また大量生産のコストも安く、4インチのシリコンウェーハ1枚につき100万台のマイクロボットを製造できます。
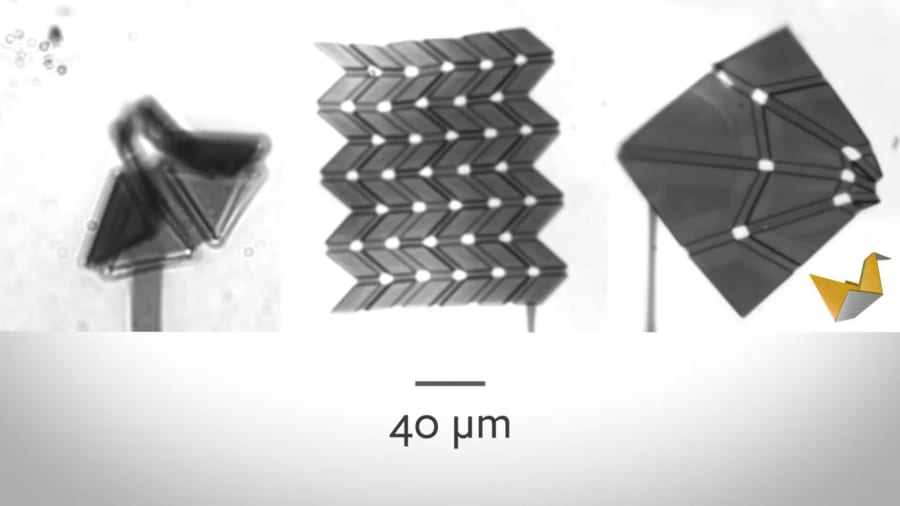
研究チームは、この胴体部に日本の折り紙技術からヒントを得た4本の足を取り付けました。
それぞれの足はプラチナとチタンの2層構造で折りたたまれており、それらが膨らむことで立体に広がり移動性を獲得します。
具体的には、正電荷を与えると周囲から負電荷が集まり、バランスを取ろうとしてプラチナが膨張するという仕組みです。
また、レーザーの照射位置をコントロールすれば、任意の足を自由自在に動かせます。

























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)