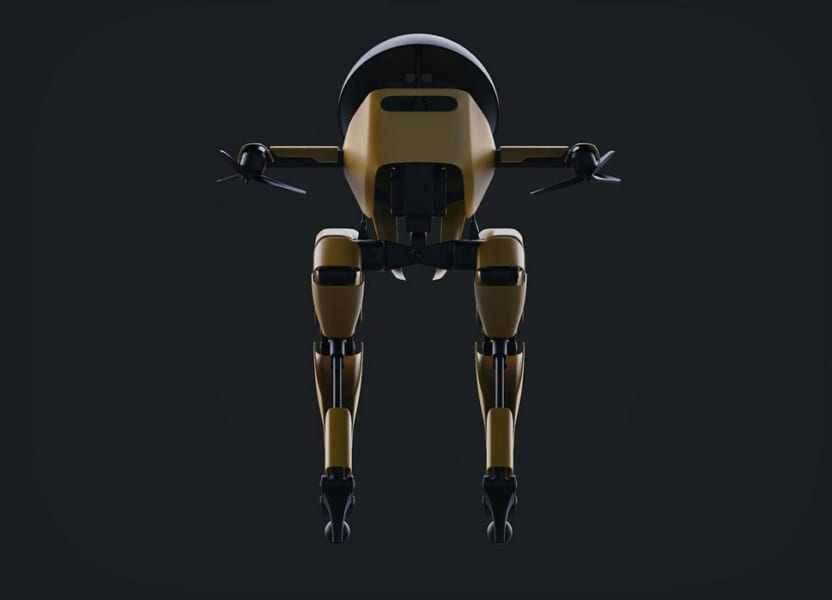
優れたバランス性能をもたせることに成功!綱渡りもできる!
LEONARDOの身長は約76cmであり、肩に4つのプロペラが付いています。
実際に飛ぶこともできますが、本当の持ち味は「プロペラ稼働による驚異的なバランス歩行」です。
プロペラによって重心を調整したり、脚への負担を軽減したりできます。
これにより綱渡りやスケートボードが可能。
また強い横風があっても転倒することなく前進できます。
さらに歩行と飛行の切り替えでスムーズに移動きるようになりました。
例えば、基本的には歩行で前進し、階段だけを小飛行でショートカットすることも可能なのです。
移動手段の幅が広がったため、状況に応じて、移動スピードと省エネのどちらを優先するか選択できるようになっています。
将来的には、非常に高い位置にある電線の検査や橋の監視など、人間には危険な作業を担えると考えられています。
とはいえ現段階では、消費電力が非常に高いというデメリットもあります。
バッテリーフルの状態でも、100秒の飛行、または3.5分の歩行しかできないのです。
今後は制御アルゴリズムの搭載を予定しており、最も安全でエネルギー消費の少ない前進方法を、自ら判断できるよう改善されます。
「飛行と歩行の融合」は、これまでのロボットには難しかった新しい分野を切り開いてくれるでしょう。


























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)
![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)