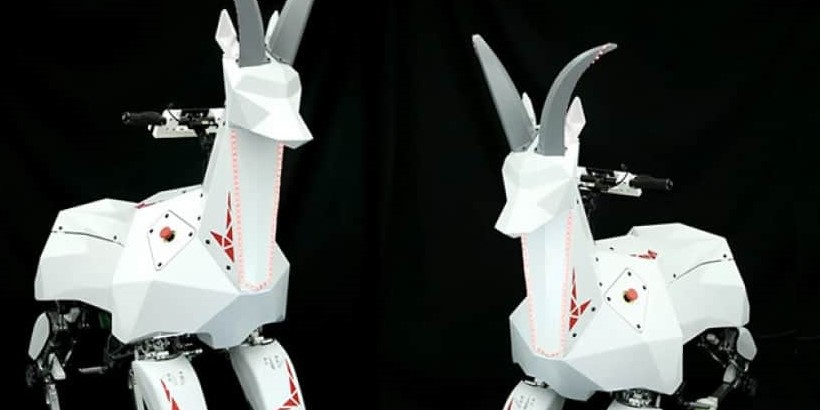



川崎重工が実用化しやすい「四足歩行ロボット」の開発へ
川崎重工は、以前から人型ロボット「Kaleido」の開発を続けてきました。
その姿は人間を模しており、実際、人間のように二足歩行で前進できます。

しかし同社は、Kaleidoの開発を通じて、二足歩行ロボットの難しさを実感していたようです。
人型ロボットは「人間にできることは何でもできる」という可能性を秘めていますが、そこに到達するには、非常に長い期間が必要です。
二本足で歩かせることさえ非常に難しいので、人型ロボットの「実用化」は程遠いと言えるでしょう。
その点、四足歩行の動物ロボットは二足歩行の人型ロボットよりも安定して歩行できます。
つまり四足歩行ロボットは「実用化しやすい」というメリットがあるのです。
しかも整地されていない場所では「車輪で進むロボット」よりもはるかにスムーズに前進できるでしょう。
そこで川崎重工は、これまでの歩行ロボット開発で培ってきた技術を用いて、新しく「四足歩行ロボット」を開発することにしました。






















![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)