砂を掘り進むヘビ型ロボット
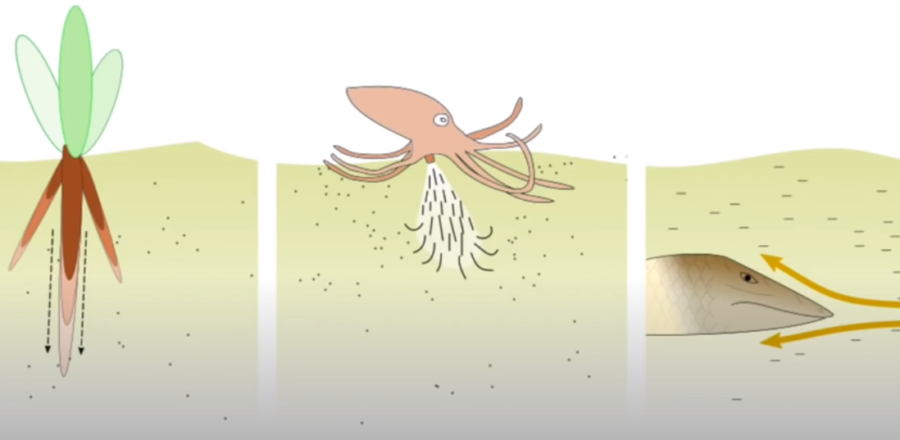
研究チームが開発したロボットは、先にあげた地面に潜る生物たちの能力を合わせたものです。
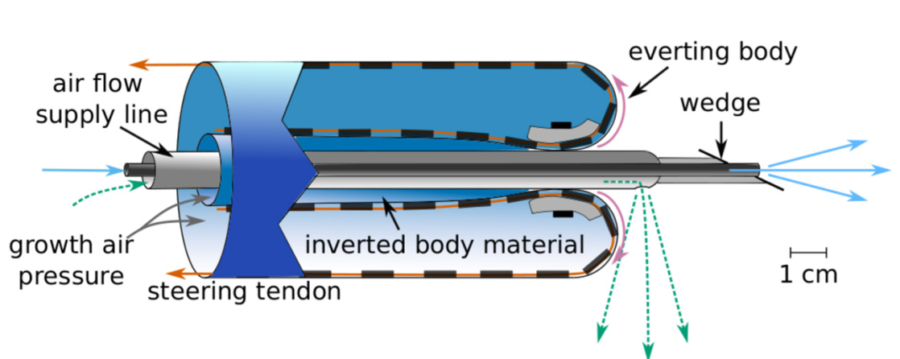
先端から空気を吹き出すことで砂を流動化させ抵抗を減らし、さらに先端だけを伸ばしていくことで全体にかかる砂との摩擦を減らしました。

この先端だけが伸びていく仕組みには、日本の吹き戻し(ピロピロ笛)の原理が利用されているそうです。
しかし、ここまで作ったところで問題が発生しました。
砂に潜ったヘビロボットは、なぜか先端がどんどん上に浮き上がってしまったのです。
この問題がもっとも解決に時間がかかったと、研究者は語っています。
砂に潜ったロボットが浮き上がってしまう原因は、水中や気体中とは異なる、地中ならではの揚力の発生方法にあります。
気体や液体は、走行する物体の上と下で均一に流れます。
しかし、地中を水平に進む場合、砂は下に押し込まれるより、上に押し上げて逃げていくほうが楽なため、上下で砂の流れが均等になりません。
結果、ロボットには飛行機の翼のような揚力が発生してしまうのです。
これは最終的に下方向に空気を噴出するという方法で解決されました。
水中や空気中では、下に流体を吹き出したら逆に浮き上がってしまいますが、地中では下に空気を吹き出すことで、下方向の砂からの摩擦が減り揚力を減少させたのです。
地中ならではの面白い現象です。
加えて頭部の形状を下向きに進みやすいよう変更することで、結果的に浮き上がる力とバランスを取って水平方向へ移動することを実現させたのです。
こうして地中を進むロボットが実現されました。
このような小型の探索用ロボットは、土壌の採取や、パイプラインなどの地下施設の設置などに活躍できると期待されています。
また低重力環境の探査にも役立つ可能性があり、現在研究チームはNASAと共同で、月の探索や、木星の衛星エンケドラスの中を潜って探索するロボットの開発プロジェクトを進めています。