カメをモデルにした水陸両用ロボ
ボッティリ氏ら研究チームは、ウミガメとリクガメをモデルにしたカメ型ロボット「ART(Amphibious Robotic Turtle)」を開発しました。

ウミガメとリクガメは同じ甲羅をもつカメですが、その足の形状と動かし方が大きく異なります。
ウミガメは海を泳ぐための細長いヒレをもっていますが、リクガメは荷重に耐えつつ陸上を歩くための太くて丸い足をもっているのです。
ARTは足を変形させることで、「ウミガメ形態」から「リクガメ形態」に移行できる「変形ロボ」です。
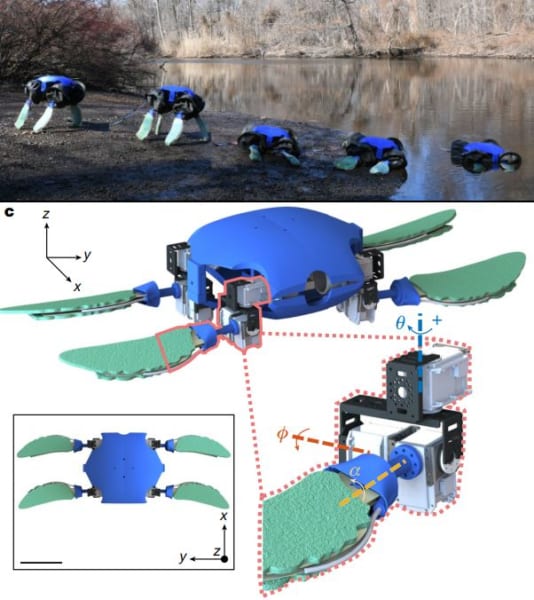
手足は剛性を変化させられる材料と人工筋肉で作られており、環境が変わるときに、形状・剛性・挙動などのあらゆる要素も変化させられます。

実際、陸上では足を膨らませてリクガメのように歩行し、砂浜では足を平たくしてウミガメが這うように移動します。
そして海中では、同じくウミガメのように揚力と抗力に基づいた水中移動が可能なのです。
両方の環境で同じ部品から推進力を生み出しているため、複数の推進機構を持つ従来の水陸両用ロボットに比べてエネルギー効率が高くなる可能性があります。
研究チームは、水陸両用の変形ロボット「ART」が、海岸線の生態系モニタリング、ダイバーのサポート、養殖、環境推移帯での運動物理学の研究などに利用できると考えています。
私たちが憧れてきたリアル「変形ロボット」は、単にかっこいいだけでなく、実用的だったのです。



























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)

![シルバーバック 【釣って遊ぼう!サメまみれ!】 知育玩具 幼稚園 小学校 入園 入学 お祝い プレゼント 準備 ([バラエティ])](https://m.media-amazon.com/images/I/41ejNUfrJZL._SL500_.jpg)