事故や災害時の救助活動に!ゆくゆくは「惑星探査」も
M4はあらゆるシーンに適応できますが、主な活動場所は事故現場や災害地となるでしょう。
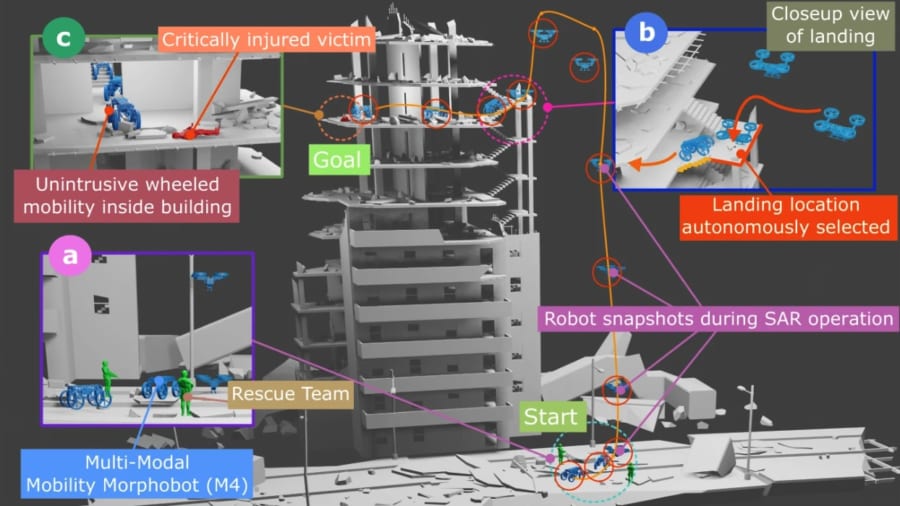
チームは想定として、地震に見舞われた高層ビルを想定しました(下図)。
M4であれば、地上からわざわざ階段を上らずとも、飛行モードで一気に屋上まで飛び、割れた窓や隙間から内部に入ることができます。
そしてケガ人を見つけると地上の救助隊に居場所を伝えたり、救助隊からの指示を人々に伝えたり、あるいは医薬品や食料物資を届けることも可能でしょう。
M4の多機能性は、人間が立ち入ることのできない危険な空間や、単一の移動モードのみに依存する従来のロボットやドローンでは困難な場所を移動するのに理想的です。
M4はすでに驚くべき能力の数々を持っていますが、研究チームはまだまだ改良の余地があると考えています。
例えば、車輪をロボットアームのように変形させれば、物をつかんで除けたり、サンプルとして採取することができます。
加えて、水中での遊泳モードも追加できれば、陸海空すべてに対処できるでしょう。
そうすれば、人類未踏の地に足を踏み入れたり、他にも月面や火星での探査に用いることも決して夢ではありません。
実際にチームは将来的な宇宙探査のために、NASAのジェット推進研究所(JPL)と協力して研究を進めていく予定と発表しています。
また、もしこの技術が大型化できれば、映画に見るような本物のトランスフォーマーが誕生する日もそう遠くないかもしれませんね。
こちらはM4をカリフォルニア工科大学の構内で自走させた様子です。























![マモルーム お部屋まるごと予防空間 ダニ用 [2ヵ月用セット] ダニアレル物質の生成抑制・ダニを除去しやすくなる ダニよけ 加熱蒸散機 ダニ対策 (アース製薬)](https://m.media-amazon.com/images/I/413VgtLwPgL._SL500_.jpg)
![ピエール ダルジャン フランス 国民 洗剤 多目的 洗浄剤 ラベンダーの香り 300g 1個 フランス 国民洗剤 皮膚に優しい 天然成分 多目的洗浄剤 クリーナー剤 お風呂掃除 [並行輸入品]](https://m.media-amazon.com/images/I/51FHSlv-XWL._SL500_.jpg)


![シルバーバック かわいい海の生きもの CUBE 2X2 キューブ ツーバイツー|海の生き物デザイン 立体パズル スピードキューブ 5cm 子ども〜大人向け 知育 ギフトに最適 ([バラエティ])](https://m.media-amazon.com/images/I/41EJOOLgGXL._SL500_.jpg)